![]()
Pour ceux qui prennent le projet en route, je leur conseil d'aller voir les synthèses précédentes pour avoir plus d'informations. Pour naviguer à travers ces pages, utilisez la flèche précédente pour revenir sur vos pas.
Edito
Le calme avant la tempête ? Peu de chose à donner pour cette fois-ci, mais il semblerait qu'une grosse partie du projet semble avancer à grand pas. Entre autre, après plusieurs essais peu concluants, une solution semble être trouvée pour la partie mécanique de l'herbivore. On doit cette solution à Nanobapt, vous trouverez sur cette page une idée de celle-ci.
Xargos n'est pas en reste, après la réalisation mécanique du carnivore, il s'est attaqué à sa programmation. De ce fait, la réalisation du carnivore est particulièrement avancée.
Nous avons envoyé le dossier de sponsorisation et nous attendons une réponse. L'affaire est à suivre en espérant une réponse favorable de leur part...
I. Propositions
I.i Herbivores
I.i.a partie mécanique
En réalisant mon propre prototype d'herbivore, je me suis rendu compte qu'il était effectivement possible pour le robot de différencier un mur d'un objet. Mais une fois l'objet saisi par la pince, celui-ci empêche l'utilisation du capteur de lumière. Or ce capteur de lumière est la pièce maitresse du robot puisque c'est à partir de lui qu'il se dirige vers la colonie.
Nanobapt propose la solution suivante (en italique, ce qui ne l'est pas son mes commentaires):
Je viens d'avoir une super idée qui répond a tout tes problèmes !!!!!!!! Bon alors pour detecter le mur ETC je pensais utiliser le capteur de proximité avec le capteur de lumière et les messages -pour voir le source de ce capteur- (les messages étant de la lumière)
Le robot ne possédera de pince mais un clark dont voici une image (réalisé avec Ldraw) :
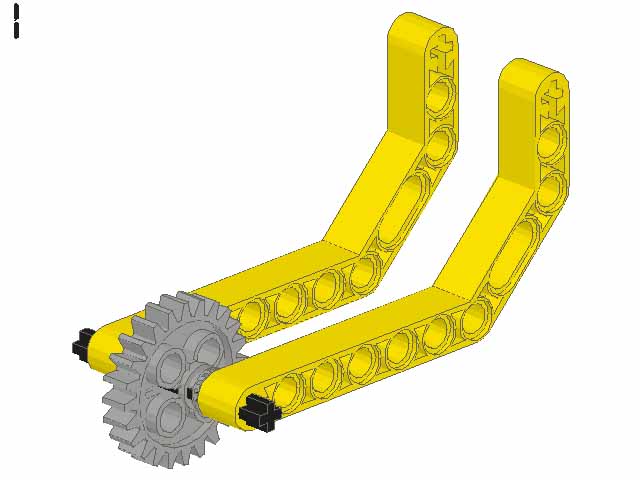
Regarde [...] le clark et tu verras peut être que je peux mettre le capteur de lumière entre les deux broches (mais non fixés a celles ci !!). Je me suis rendu compte que quand on lève le clark il y a une partit qui n'est pas cachée par celui-ci ni par l'aliment !!!!!!
Pour pouvoir être saisi par le clark, l'objet aura la forme d'une altère à bras. (Mais pas forcemment cylindrique!)
Ce qui donne : je peux detecter les murs avec la proximité (et les aliments ) je peux detecter facilement quel objet se trouve devant moi (a condition que le mur et l'aliment de soit pas de la même couleur. En faisant des essaies j'ai vue que pour prendre l'objet il faut être assez précis : il ne faut donc pas louper sont coup !!!! Mais en faisant cette solution je peux voir si l'objet est pris dans la pince ou non !! je pense que c'est la meilleur solution ! Jai mis un capteur tactile a l'artière mais je me demande si on en aura encore besoins !!
De plus les message envoyé par le RCX pour avoir la proximité serviront aussi pour les carnivores : reconstistution d'un ecosystème les carnivores utilises les traces laisser par les herbivores (envoyer des messages sans raison c'est pas marrant !!) En faisant des essaies j'ai vue que l'aliment etait pris assez rapidement et que pour les deposer il avait tendance a le jeter !!! ca peut être bien. Mias le moteur était en pleine puissance .... donc on pourra le ralentir !!
dimensions : largeur 14 cm
longueur : 20 (+6 quand le clark est deployé)cm
hauteur : 12 cm (a cause du capteur sur le dos :!!!
Nanobapt attend le développement des photos. Il faudra être un peu patient. Par contre le capteur d'attaque, lui, n'est toujours pas réalisé.
I.i.b Partie logiciel
Avec les nouvelles données de la partie mécanique, il est fort probable qu'un certain nombre de points ci-dessous soient à oublier...
Les programmes suivants sont pour la pluspart des améliorations de programmes qui ont déjà été publiés sur le site.
Nanobapt propose le comportement global d'un herbivore. Pour accéder au code en NQC.
La partie du programme qui se charge de la communication : prog.
Détecter un objet ou un mur. On a la solution suivante en NQC. Le programme est testé et il fonctionne sans bug. Le programme dandineur auquel il est fais allusion.
Il est nécessaire de coder la partie manipulation de la pince.
Il est nécessaire de coder la partie détection attaque carnivore.
I.ii Carnivores
I. ii. a. Partie mécanique
Voilà une photo du carnivore avec son bras d'attaque:
I. ii. b. Partie logiciel
Accés au comportement programmé en NQC du carnivore (Source Xargos). Le programme n'est pas encore complet, et il n'est pas encore testé.
II. Synthèse
On ne tiens pas encore le bon bout, mais c'est sur la bonne voie. Chose qu'il était facile de prévoir, le planning n'est pas suivi (merci quand même à Xargos pour avoir fait l'effor de fournir le programme en NQC du comportement du carnivore pour la date fixée alors qu'il a prit connaissance du travail à faire avec 10 jours de retard).
Mais je sais ou ça a pêché, et c'est en partie ma faute! Je pense que se sera assez facile à rectifier. Pour l'heure, je laisse chacun finir sur quoi il travail, je redonnerais un planning plus tard.
Nous sommes le 04-03-01. Je donnes rendez-vous le 11-03-01 pour une nouvelle mis à jour. C'est la semaine prochaine, ceci dans le but de ne pas prendre de retard.