![]()
Pour ceux qui prennent le projet en route, je leur conseil d'aller voir les synthèses précédentes pour avoir plus d'informations. Pour naviguer à travers ces pages, utilisez la flèche précédente pour revenir sur vos pas.
I. Analyse du projet, fiches et divers :
Conne de détection :
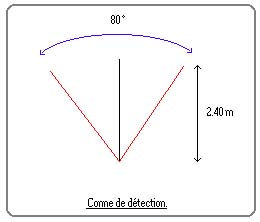
Les valeurs données ci-après sont données à titre indicatives. Elles permettent avant tout de fixer les idées.
Les valeurs données sont limites. Portée du RCX: court.
50° <= angle <= 130 °
Avec ces grandeurs, il nous est maintenant possible de juger de la taille de l'arène.
J'ai mis en place deux fiches pour éviter de s'égarer dans l'avance du projet. Vous verrez, elle sont assez simple à utiliser. En fait elle résume le cahier des charges et, du point de vu réalisation technique, permettera de juger de notre retard ou non. Pour l'instant elles sont vide, je laisse les utilisateurs les remplirs, me faire des propositions et me les envoyer... Pour avoir plus d'informations sur ces fiches, consultez la synthèse n°2.
Pour accéder aux fiches .
II. Propositions
II.i Herbivores
II.i.a partie mécanique
L'image d'un herbivore déjà réalisé est proposé par Xargos sur le site . On remarquera que la partie mécanique qui sert à détecter une attaque d'un carnivore n'est pas implémenté. Il manque aussi le parchoc de détection des murs et des objets.
II.i.b Partie logiciel
Nanobapt propose le comportement d'un herbivore. Pour accéder au programme: algo.
Je n'ai pour l'instant pas de commentaire. Que ceux qui le lisent et qui pensent qu'il y a des erreurs ou des imprécisions le fassent savoir sur le forum. Nanobapt devrait m'envoyer, je l'espère, une version NQC, ce qui nous permettra de tester le robot.
Pour ma part je me suis intéressé à la partie communication entre deux herbivores. Pour cela, il faut mettre en place un protocole (simple) de communication. On va considérer 3 codes, chaque code représentant un état de l'herbivore.
Le code 255 émis en permanence, indique la présence de l'herbivore qui l'emet.
Le code 254 indique la présence d'un herbivore qui est à l'arret. Il est pret à communiquer.
Le code 253 indique la fin d'une communication.
Pour accéder au programme : prog.
Remarque :
Le protocole est très simple. On remarquera que c'est à l'initiative du robot qui détecte la présence d'un autre de lui demander des informations. La communication se fait même s'il n'y a rien à dire. Le programme se compile sans erreur. Mais je n'ai pour l'instant pas les outils pour vérifier si le protocole se comporte bien comme je le souhaite. Une fois que j'aurais ces outils, la mise au point ne devrait plus être très longue!
Je me suis aussi intéressé à la partie détection d'un objet ou d'un mur. C'est un sujet qui semble troubler Xargos. Je propose la solution suivante en NQC. Le programme est testé et il fonctionne sans bug. Le programme dandineur auquel je fais allusion.
Il est nécessaire de coder la partie manipulation de la pince.
Il est nécessaire de coder la partie détection attaque carnivore.
II.ii Carnivores
II. ii. a. Partie mécanique
Xargos nous propose ceci (ce sont les commentaires de la fiche qu'il a envoyé) :
Il sera propulsé par 2 roues de moyenne taille directement accroche au moteur sans reducteur de puissance, il n'aura que 2 roues afin de lui permetre de tourner facilement sur lui meme (pour une meilleur detections des H)
Moteur servira a actionner l'arme pour frapper le robot H, mais j'ai besoin de la hauteur du capteur de touche du robot H pour decider de comment placer l'arme.
Il me semblait que j'avais une photo avec un Carnivore et son bras d'attaque. Je ne la retrouve plus. Mais Xargos s'occupent activement de la partie carnivore.
II. ii. b. Partie logiciel
Accés au comportement programmé en RCX du carnivore (Source Xargos). J'espère avoir très bientôt le code en NQC.
III. Synthèse
On ne tiens pas encore le bon bout, mais c'est sur la bonne voie. Voici, les instructions à suivre :
Le tableau suivant est un petit planning. Il faut s'y tenir, évidemment il est plutôt conseillé de prendre de l'avance. J'attire l'attention sur les dates, l'ordre n'est pas chronologique.
Plage date |
Robot |
Faire |
| 11-02-01 / 25-02-01 | Herbivore | Attraper avec la pince et rammener la nourriture à la colonie. |
| 11-02-01 / 25-02-01 | Herbivore | Eviter
un mur. Détection attaque carnivore. |
| 25-02-01 / 11-03-01 | Herbivore | Comportement de fuite. |
| 25-02-01 / 11-03-01 | Herbivore | Partie mécanique complète. |
| 11-03-01 / 25-03-01 | Herbivore | Intégration complète. |
| 11-02-01 / 25-02-01 | Carnivore | Recherche des herbivores et attaques. |
| 25-02-01 / 11-03-01 | Carnivore | Recherche de la colonie. |
| 11-03-01 / 25-03-01 | Carnivore | Partie mécanique complète. |
| 11-03-01 / 25-03-01 | Carnivore | Intégration complète. |
?? |
Carnivore + Herbivore | Détermination de la taille de l'arène, confrontation des comportements... |
?? |
?? |
Aspects pratiques: rédaction du dossier de participation, organisation, concours... |
Certaines choses dans le planning sont déjà passablement avancées (entre autre pour le carnivore...). Xargos s'occupe plus particulièrement du C, j'aimerais qu'il m'indique s'il y a des imprécisions ou s'il faut rajouter des étapes. Il manque certainement des parties aussi pour l'herbivore. Merci de me le dire. J'ai fais le planning en considérant qu'il y avait trois personnes actives dessus. Toute nouvelles personnes seront les bienvenues (Touffy ?). Aucune tâche n'est attribuée, j'ouvrirais sur le forum une question afin de permettre aux gens d'indiquer sur quelle partie elles souhaites travailler.
Accéder au site Robolife : http://www.robolife.fr.st/
J'ai trouvé de quoi réaliser des dessins Lego avec un logiciel de CAO spécialisé dans la conception de plans lego. Ci-joins les @ où il est possible de les télécharger.
A priori, il n'y a pas de bibliothèque spécialisé pour les pièces MindStorms ou CyberMaster. Les bibliothèques Technic et Electric semblent suffir. Avec des utilitaires supplémentaires, il est possible de transformer le dessin en image de synthèse à l'aide de POV... Pour Ldraw, lisez bien toutes les instructions. En cas de problèmes (uniquement pour l'installation), me contacter.
Nous sommes le 11-02-01. Je donnes rendez-vous le 25-02-01 pour une nouvelle mis à jour. Cela laisse 2 semaines pour proposer et améliorer de nouveaux éléments.